Lab 1B
Objective
Lab 1B sets up Bluetooth communication between the computer and Artemis board, enabling Python commands from the Jupyter server to control the board. It also establishes a data transmission framework for future labs.

Prelab
Setup
To set up my computer for Lab 1, I installed Python, created a virtual environment, and connected to the Jupyter server. To set up the Artemis Board, I first downloaded the provided codebase. I then updated the Artemis MAC Address and changed the BLEService UUID to ensure exclusive connection to my own board.
Codebase
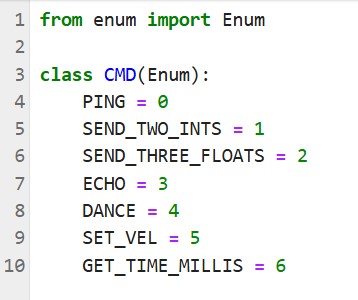
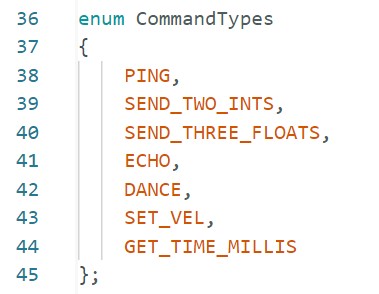
The provided codebase sets up a Bluetooth Low Energy (BLE) communication channel between the computer and the Artemis board using the ArduinoBLE library on the Artemis and a Python interface on the computer via Jupyter Labs. In BLE communication, UUIDs differentiate data types, while BLE characteristics handle data transmission. Commands sent from the computer are processed by the RobotCommand class in ble_arduino.ino. The handle_command() function interprets these commands using a switch statement to execute corresponding actions. The EString class is used for handling character arrays, and BLECStringCharacteristic is used to send and receive string-based commands. When transmitting data, it is important to keep in mind that the maximum message size that can be sent via BLE is 150 bytes.

ECHO
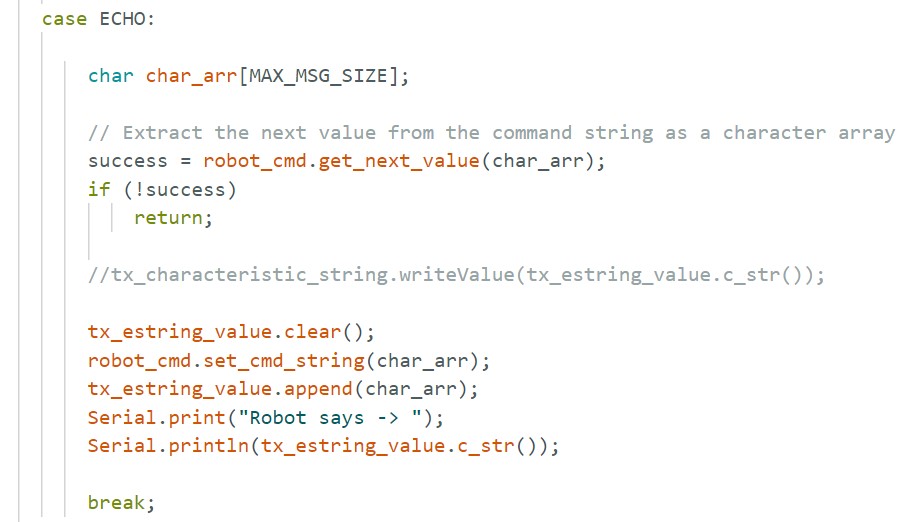
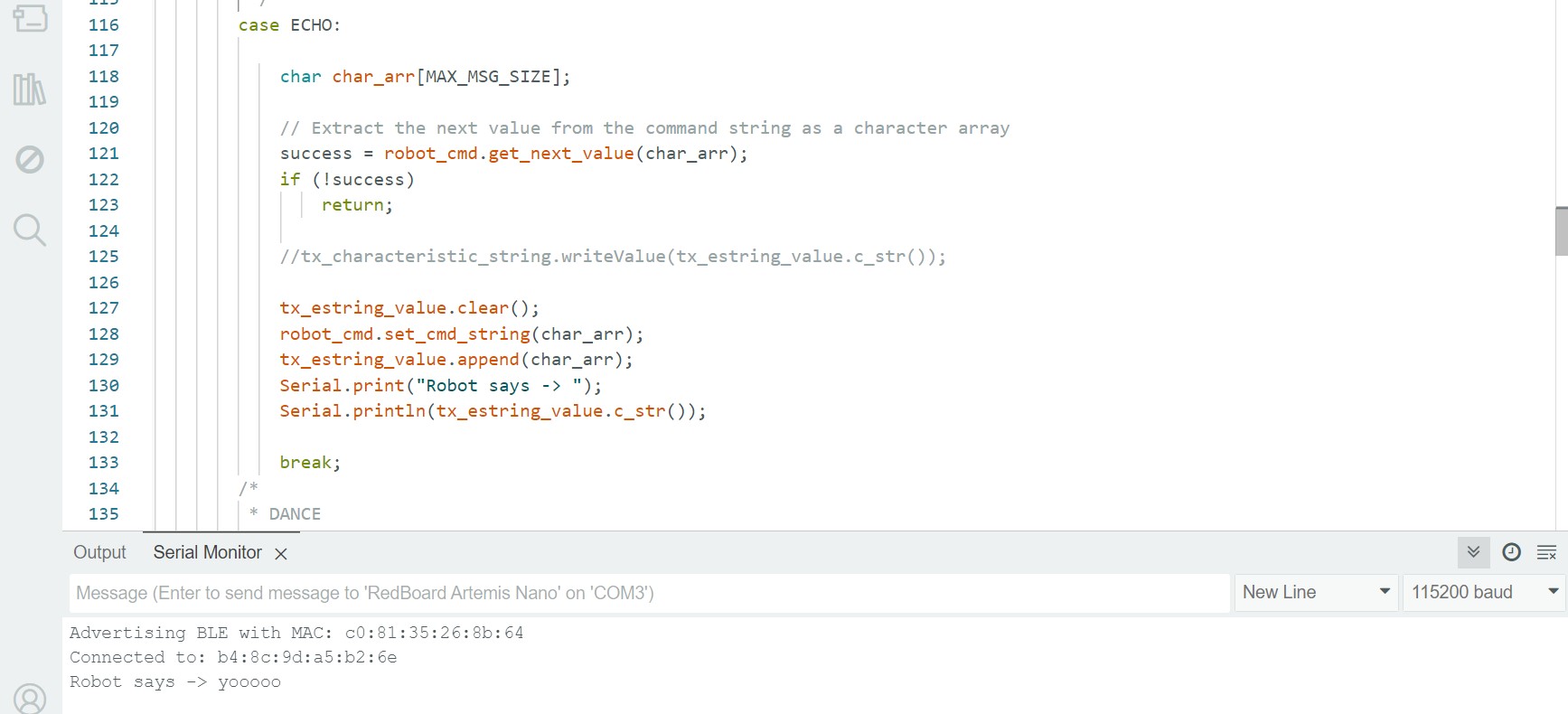
I implemented the ECHO command, which is used to send a string from the computer to the Artemis board. The Artemis board then sends an augmented string back to the computer. For instance, if “yoooo” is sent, the message received will be “Robot says -> yoooo”.


SEND_THREE_FLOATS
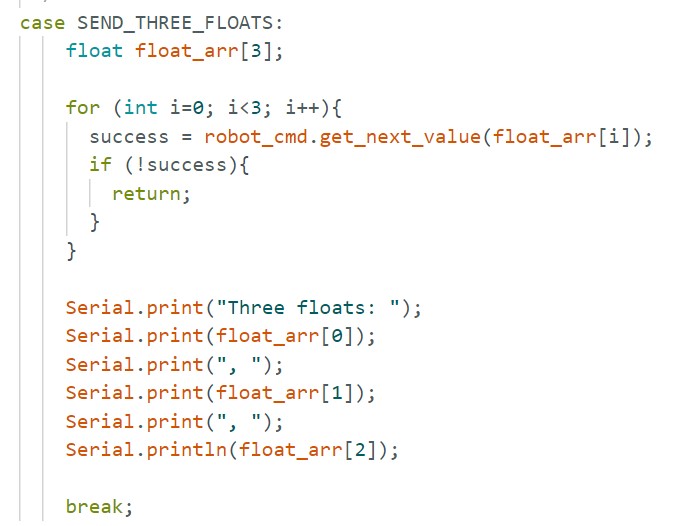
I implemented the SEND_THREE_FLOATS command. It is used to send three floats to the Artemis board, which then extracts the three values.
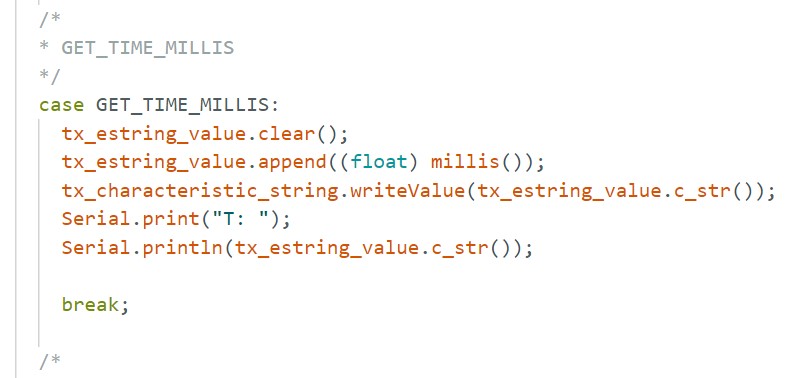

GET_TIME_MILLIS
I implemented the GET_TIME_MILLIS command, to which the Artemis must reply by writing the current time in milliseconds to the string characteristic.
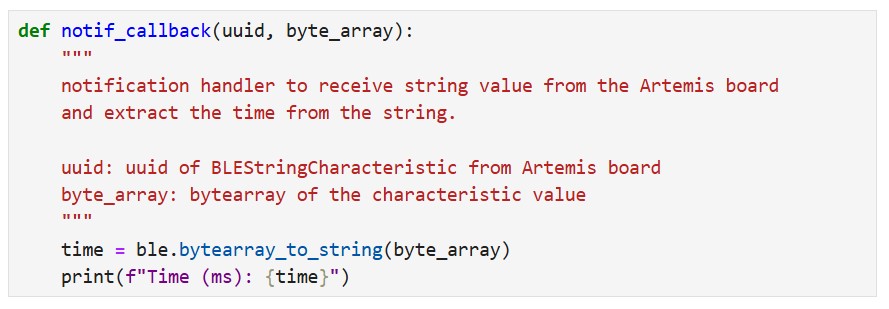
Notification Handler
I set up a notification handler in Python, which will allow the computer to continuously collect data without needing to explicitly issue read commands.
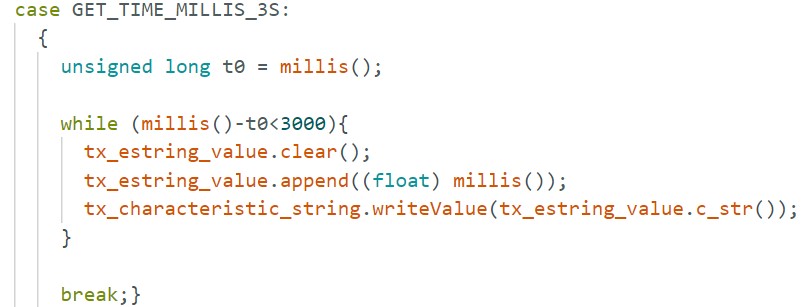
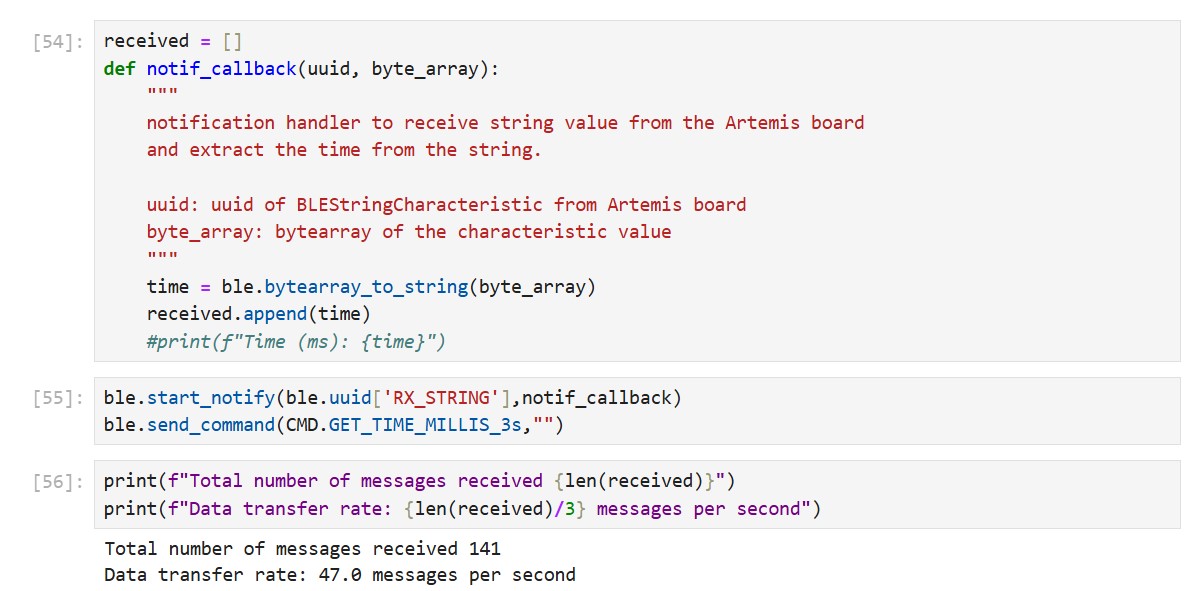
GET_TIME_MILLIS_3S
I implemented the GET_TIME_MILLIS_3S command, which tells the Artemis to continuously write the current time in milliseconds to the string characteristic for 3 seconds. The notification handler receives and processes these messages. With this method, I was able to track the data transfer rate.
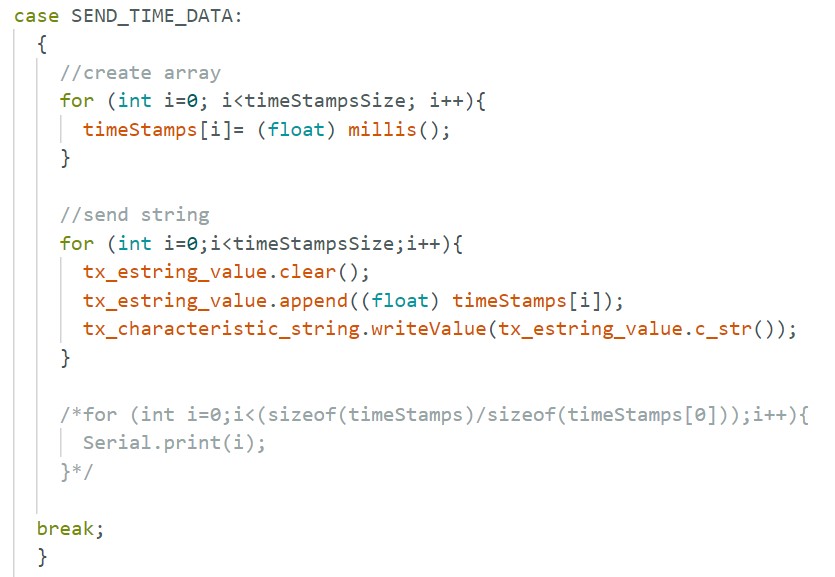
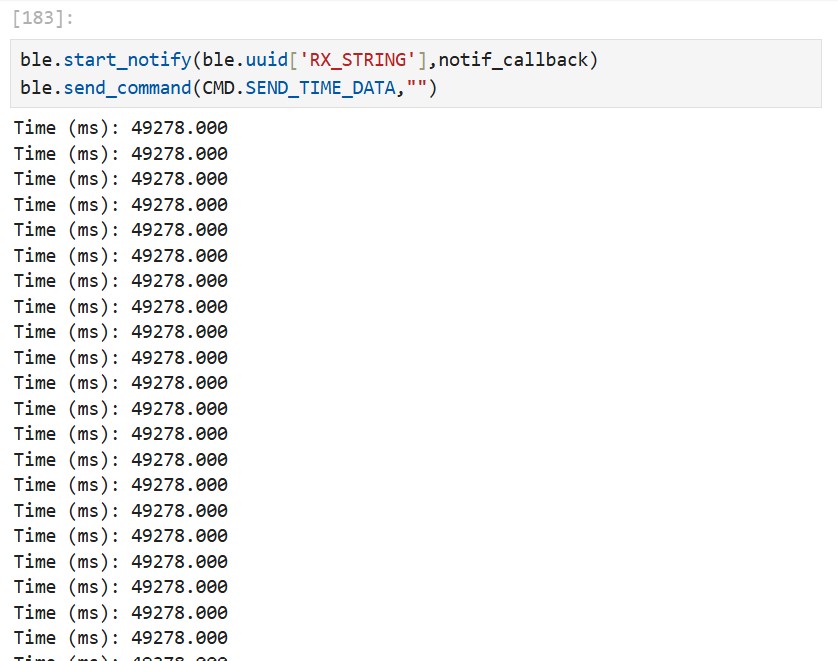

SEND_TIME_DATA
My implementation of the SEND_TIME_DATA command tells the Artemis to first
store timestamps in a global array, then loop through the array to send each entry
to the laptop as a string. In the Python interface, I stored all the received
messages in a list to check if all the data was sent. Since I was only sending one entry
at a time (each timestamp was 4 bytes in size, well under the 150-byte limit), I did not have
to worry about limiting my array size so I set it to 300.
However, it is important to note that my implementation would have looked very different if
I were required to send the entire array of messages at once. Since the BLE protocol used
in this lab sets a 150-byte limit on data that can be sent, my array size would be capped at 150.
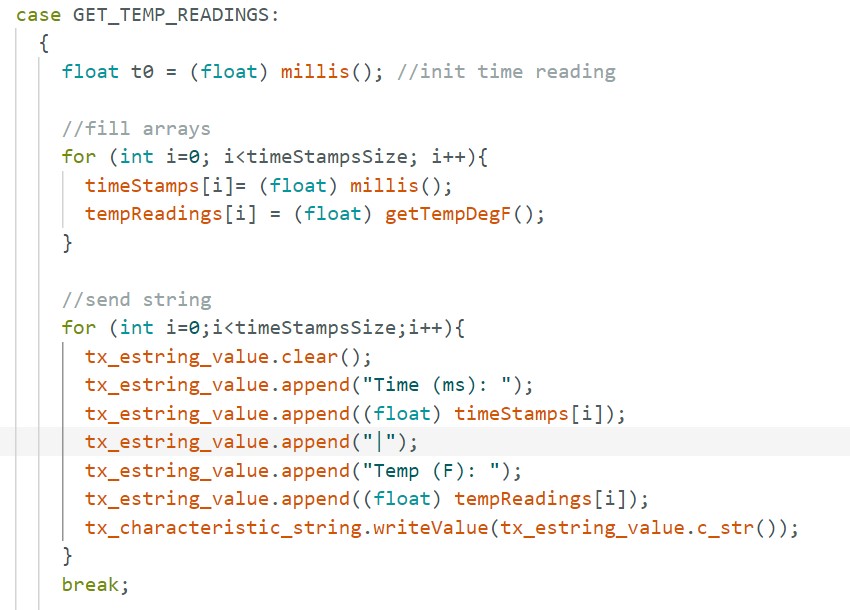
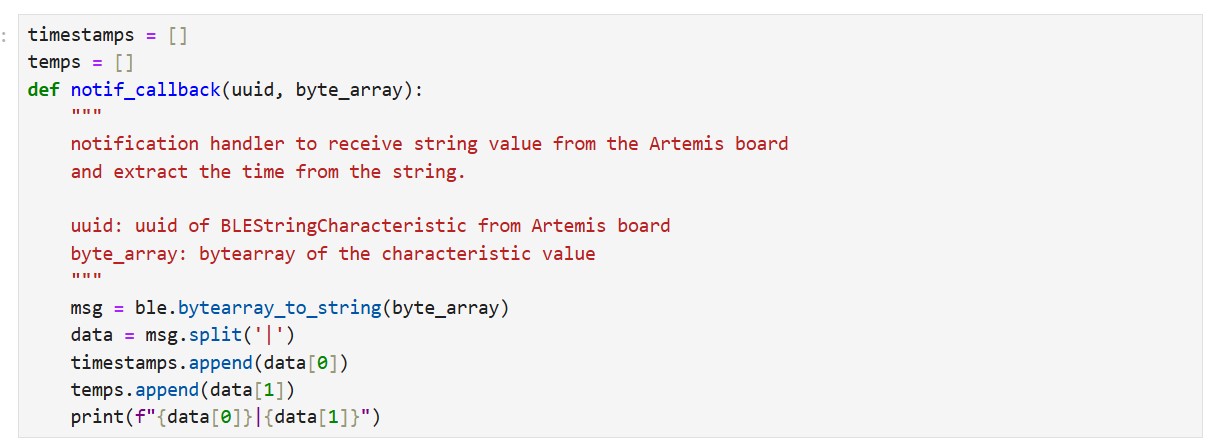
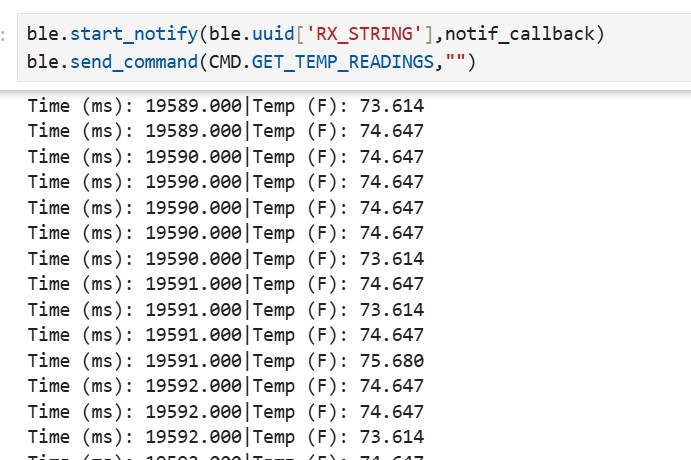
GET_TEMP_READINGS
My implementation of the GET_TEMP_READINGS command tells the Artemis to first store timestamps and temperatures in seaparte global arrays, then loop through both arrays simultaneously to send each entry to the laptop as a string. In the Python interface, I split the message into its time and temperature components, and stored each in a separate list.
Discussion
Lab 1B was very helpful for familiarizing myself with Bluetooth communication. It was also a good way to visualize real-time data collection, and offered a glimpse into the ideas of data transfer rate, which will be very important later on.