Objective
The goal of this lab was to use the Bayes Filter to implement grid localization on the virtual robot.
The goal of this lab was to use the Bayes Filter to implement grid localization on the virtual robot.
To characterize the robot's motion we use the odometry model, which splits up robot motion into three steps:
Here we calculate the transition probability from the previous pose to the current pose, given the current/previous poses and the control inputs we used. Given the current/previous poses, we can calculate the ideal set of motions the robot would've taken to get from one to the other. We compare this against the actual set of motions the robot took, and determine how likely it was for the robot to end up where it is now. We assume each movement is a Gaussian variable, and that the movements are independent from one another.
The prediction step of the Bayes Filter puts the above two steps togethe by calculating the transition probabilities between every grid cell. These transition probabilities are used to predict the robot's next state, bel_bar. To save computation time, cells that have very low transition probabilities are ignored.
Each measurement is an independent Gaussian variable: given the robot's observations, we find the likelihood of each sensor measurement.
We incorporate measurement uncertainty into our beliefs and update loc.bel accordingly.
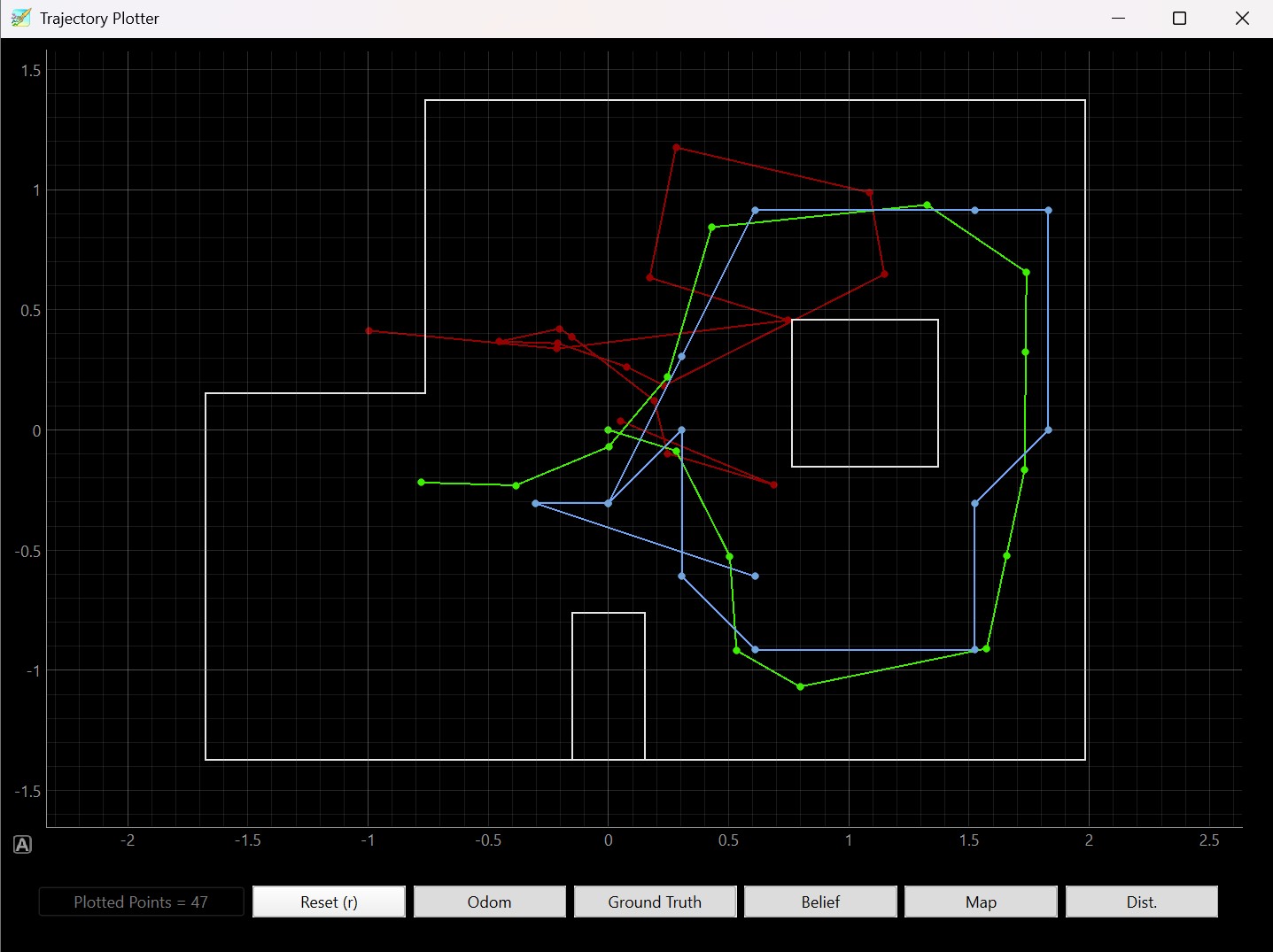

The video shows my Bayes filter running. The raw odometry does a poor job of locating the robot and characterizing its motion. The Bayes filter, however, does a pretty good job of estimating where the robot is as it is not that far off from the ground truth.
Here is some of the data I collected: